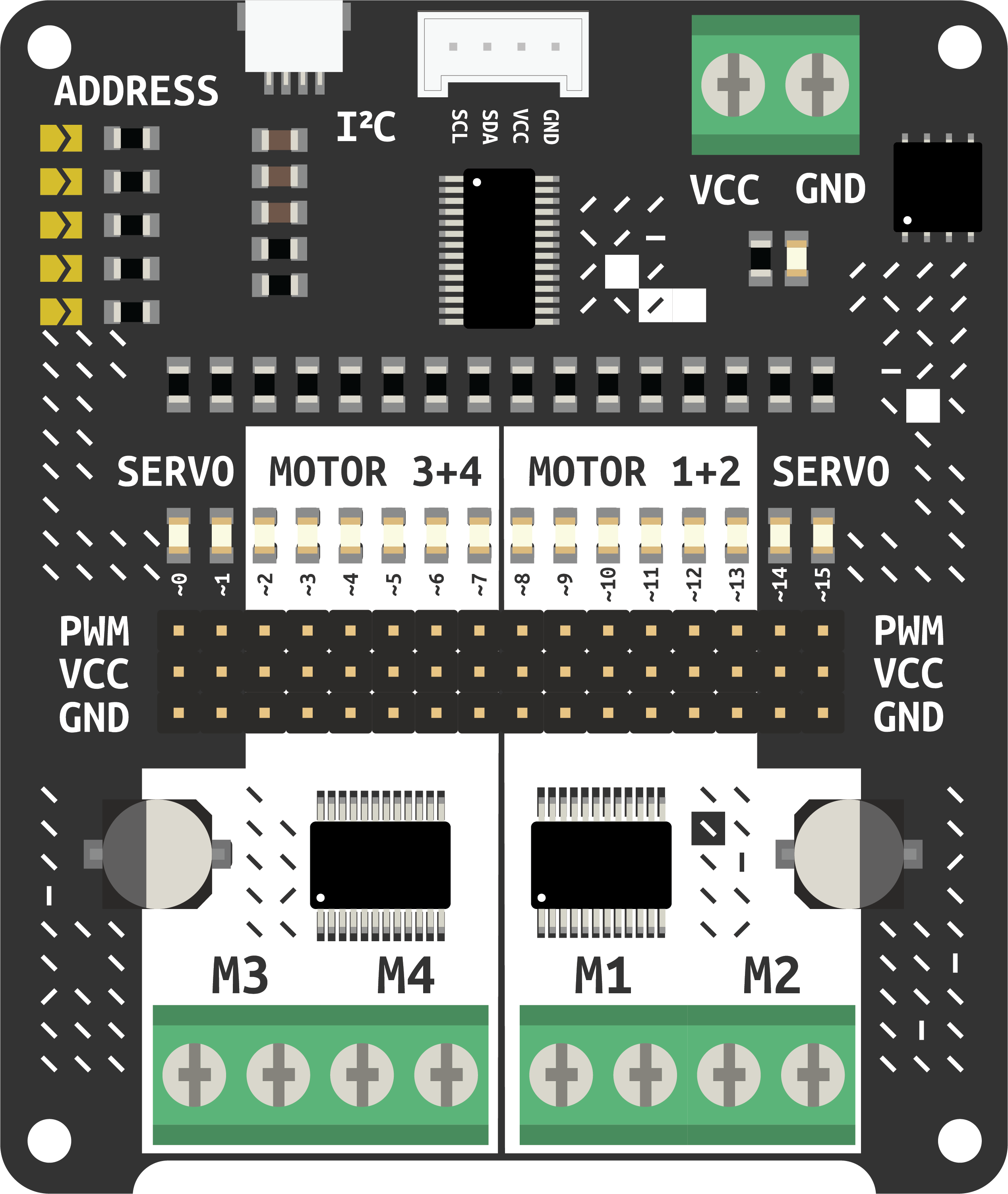
Motor Driver

< one sentence explaination of item >
Required Libraries
link to library
Basic Usage
Example LED
This goes through all LEDs on the board and fades them in and out one by one. (from adafruit)
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
import time
import board
from adafruit_pca9685 import PCA9685
# Create the I2C bus interface.
i2c = board.I2C() # uses board.SCL and board.SDA
# i2c = busio.I2C(board.GP1, board.GP0) # Pi Pico RP2040
# Create a simple PCA9685 class instance.
pca = PCA9685(i2c, address=0x60)
# Set the PWM frequency to 60hz.
pca.frequency = 60
def fade_led_in(channel, steps=100, delay=0.0001):
for i in range(steps):
# Calculate the duty cycle value (0 to 0xFFFF)
duty_cycle = int(0xFFFF * (i / steps))
pca.channels[channel].duty_cycle = duty_cycle
time.sleep(delay)
def fade_led_out(channel, steps=100, delay=0.0001):
for i in range(steps):
# Calculate the duty cycle value (0 to 0xFFFF)
duty_cycle = int(0xFFFF * ((steps - i) / steps))
pca.channels[channel].duty_cycle = duty_cycle
time.sleep(delay)
# Ensure the LED is fully off at the end
pca.channels[channel].duty_cycle = 0x0000
# Light up each LED one by one with a fade effect and then turn them off
while True:
for channel in range(16):
fade_led_in(channel)
time.sleep(0.1) # Optional: wait half a second after fading in
fade_led_out(channel)
time.sleep(0.1) # Optional: wait half a second after fading out
Example Servo
(from adafruit)
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
"""Simple test for a standard servo on channel 0 and a continuous rotation servo on channel 1."""
import time
from adafruit_servokit import ServoKit
# Set channels to the number of servo channels on your kit.
# 8 for FeatherWing, 16 for Shield/HAT/Bonnet.
kit = ServoKit(channels=16, address=0x60)
kit.servo[0].angle = 180
time.sleep(1)
kit.servo[0].angle = 0
time.sleep(1)
Example DC motor
turn motor 1 full throttle forward (from adafruit)
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
"""Simple test for using adafruit_motorkit with a DC motor"""
import time
import board
from adafruit_motorkit import MotorKit
kit = MotorKit(i2c=board.I2C())
while True:
kit.motor1.throttle = 1.0
time.sleep(1)
kit.motor1.throttle = 0
time.sleep(1)
kit.motor1.throttle = -1.0
time.sleep(1)
kit.motor1.throttle = 0
time.sleep(1)
Example Stepper motor
turn 100 steps with a stepper motor (from adafruit)
# SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
# SPDX-License-Identifier: MIT
"""Simple test for using adafruit_motorkit with a stepper motor"""
import time
import board
from adafruit_motorkit import MotorKit
kit = MotorKit(i2c=board.I2C())
for i in range(100):
kit.stepper1.onestep()
time.sleep(0.01)